Linux에서 USB 장치는 ttyUSB, ttyACM0 등등의 이름으로 연결이 됩니다.
센서를 여러개 쓰는 로봇의 특성 상, serial 포트 권환과 장치 이름을 찾아다니기엔 너무 불편합니다..
이름과 권한 등을 자동으로 설정시키면 연결 순서에 상관없이 이름과 권한 주기에 편리하다!
udev 폴더 내부에서 설정 작업을 진행하겠습니다.
1. 환경
- raspberry pi 4
- arduino mega pro
- ydlidar x2
- webcam
먼저 라즈베리파이에 ssh 접속을 합니다.
$ ssh subin@192.168.0.~~
업데이트 후 mc 설치
$ sudo apt update
$ sudo apt install mc
혹시 모를 장치와 충돌을 막기 위해 brltty를 제거합니다.
$ sudo apt remove brltty
2. USB 장치 확인
lsusb로 연결 된 USB 장치를 확인합니다.
$ lsusb
| 기기 | Vendor ID | Product ID | Description |
| webcam | 0c45 | 6367 | Microdia HCAM01N |
| arduino mega pro | 1a86 | 7523 | QinHeng Electronics CH340 serial converter |
| ydlidar x2 | 10c4 | ea60 | Silicon Labs CP210x UART Bridge |
활성화 된 USB 포트를 확인합니다. (lidar는 미리 실습 해봤다는 사실)
$ ls /dev/tty*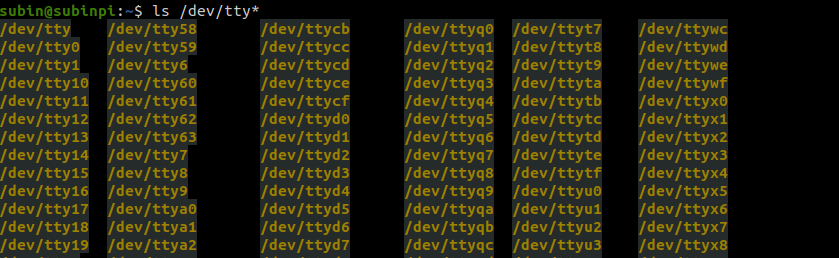
99-minibot-devices-rules 파일을 local pc에서 생성

raspberry pi로 다시 가서
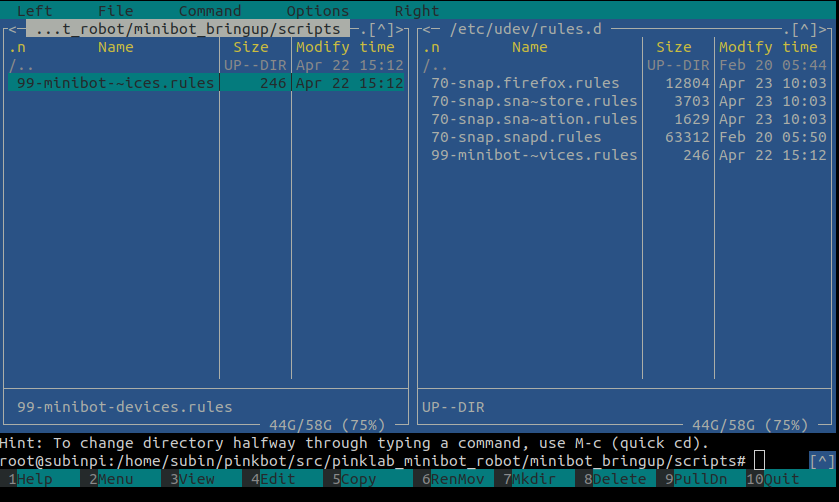
$ sudo mc
이러한 파란색 화면으로 도착합니다
local_pc에서 99-minibot-devices-rules 파일이 있는 곳으로 이동 후
rapsberry pi는 /etc/udev/rules.d로 이동
local에서 F5 copy 후 이동시킵니다.
raspberry pi를 재부팅
$ sudo reboot
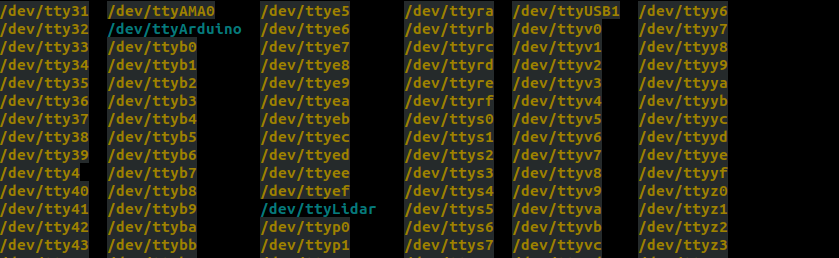
다시 확인 해보면 설정이 완료된 걸 확인 하실 수 있습니다!
$ ls /dev/tty*